

具身机器人一体化关节设计与测试 培训
课程目标:
- 理解人形机器人一体化关节的组成、功能和主流技术路线。
- 掌握关节需求定义方法,理解峰值扭矩、连续扭矩、转速、背隙、刚度、温升、寿命等核心指标。
- 理解电机、减速器、驱动器、编码器、轴承和结构件之间的匹配关系。
- 了解 SolidWorks、Motor-CAD、KISSsoft 在关节设计流程中的应用边界。
- 建立关节测试评价体系,能够判断一个关节方案是否具备工程可行性。
本课程将结合典型专利结构、工程案例和软件工具演示,围绕一体化关节的需求定义、核心部件设计、集成布局、热设计、振动风险和测试评价展开,帮助学员建立从方案理解到工程评价的完整思路。
课程主线:
关节认知→ 专利解析 → 需求定义 → 电机设计 → 减速器设计 → 驱动与传感 → 集成设计 → 拓扑 / 热 / 振动 → 测试评价 → 方案评审
课程对象:
机械、电机、传动、控制、测试、机器人产品及相关工程技术人员
贯穿案例:


120Nm级人形机器人一体化关节方案分析
立即报名
活动咨询:赵经理 139 1642 7185
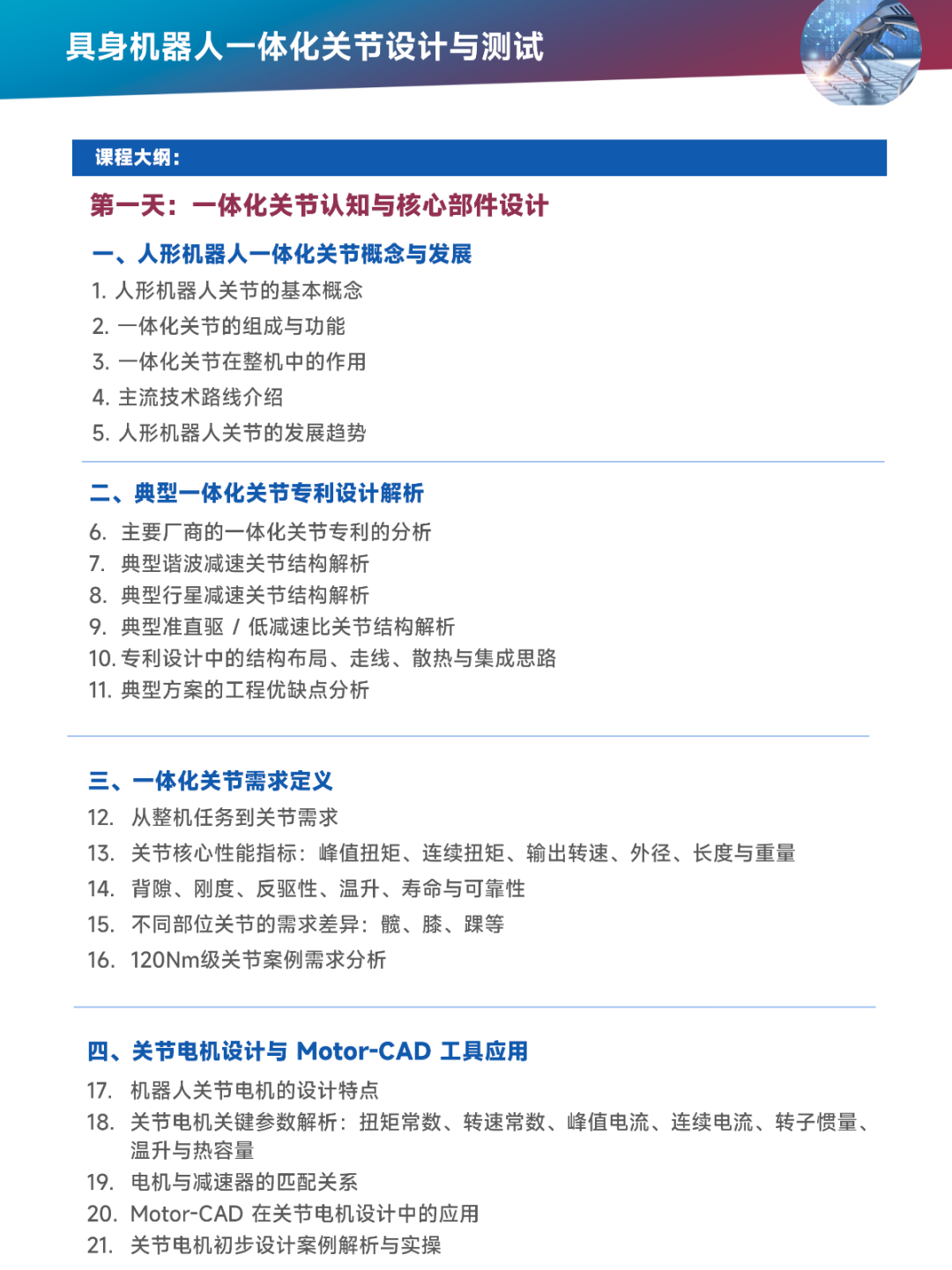
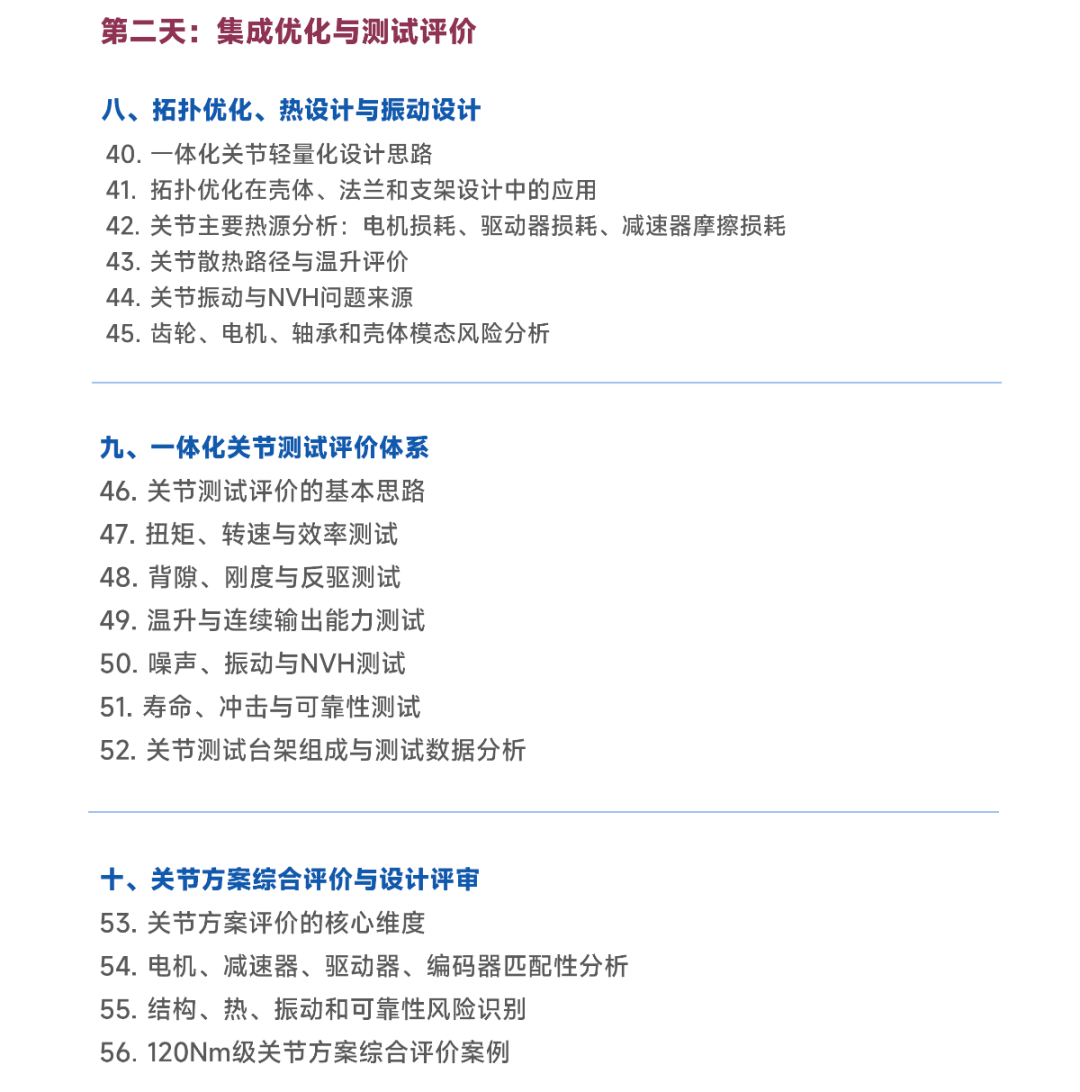
课程大纲

立即报名
活动咨询:赵经理 139 1642 7185
